HackeD By TeaM_CC :: 0x0 WAS HERE
Hacked By TeaM_CC :: 0x0 WAS HERE
Your Security breached ….
No security is perfect
Facebook.com/cyber.command0s
[+]Team_CC[+]
Read User's Comments
Your Security breached ….
No security is perfect
Facebook.com/cyber.command0s
[+]Team_CC[+]






1. Pengenalan Video
Kami membuat sebuah iklan layanan masyarakat dengan tema “Stop Bullying”. Judul dari iklan ini adalah “Did God Reject His People?”. Filosofi yang kami dapatkan dari sebuah ayat kitab suci yang menganalogikan bahwa Tuhan pun tidak akan mendiskriminasi umat-Nya sendiri, lalu mengapa kita sebagai sesama insan malah melakukannya? Iklan yg berdurasi kurang lebih 9 menit ini mengajak para penonton untuk menghentikan aksi-aksi Bully-ing terhadap siapapun dan dimanapun. Kami menyampaikan video ini secara visual sehingga penonton dapat memahami isi dari video ini tanpa perlu adanya dialog antar talent.
2. Latar Belakang dan Tujuan
Aksi Bully-ing banyak memakan korban. Mulai dari mengalami guncangan mental, luka fisik, dan ironisnya tidak sedikit yang berakhir pada kematian. Mereka mati secara konyol dan sia-sia. Karena itu, kami berharap dengan hadirnya video ini kami dapat membuka pikiran penonton agar tidak menganggap enteng tindakan bully-ing ini. Jika anda salah satu dari pelaku bully-ing, berhentilah. Jika anda menyaksikan seseorang menjadi korban bully-ing, lindungilah mereka, dan laporkan tindakan tersebut pada pihak yang berwenang.
3. Storyboard
SCENE 1 – CUT 1
Action:
Alarm dari hp berbunyi. Nicholas terbangun dari tidurnya.
SCENE 1 – CUT 2
Action:
Nicholas sudah berpakaian. Menjalani hari penuh kebahagiaan dan bersiap berangkat untuk kuliah.

SCENE 2 – CUT 1
Action:
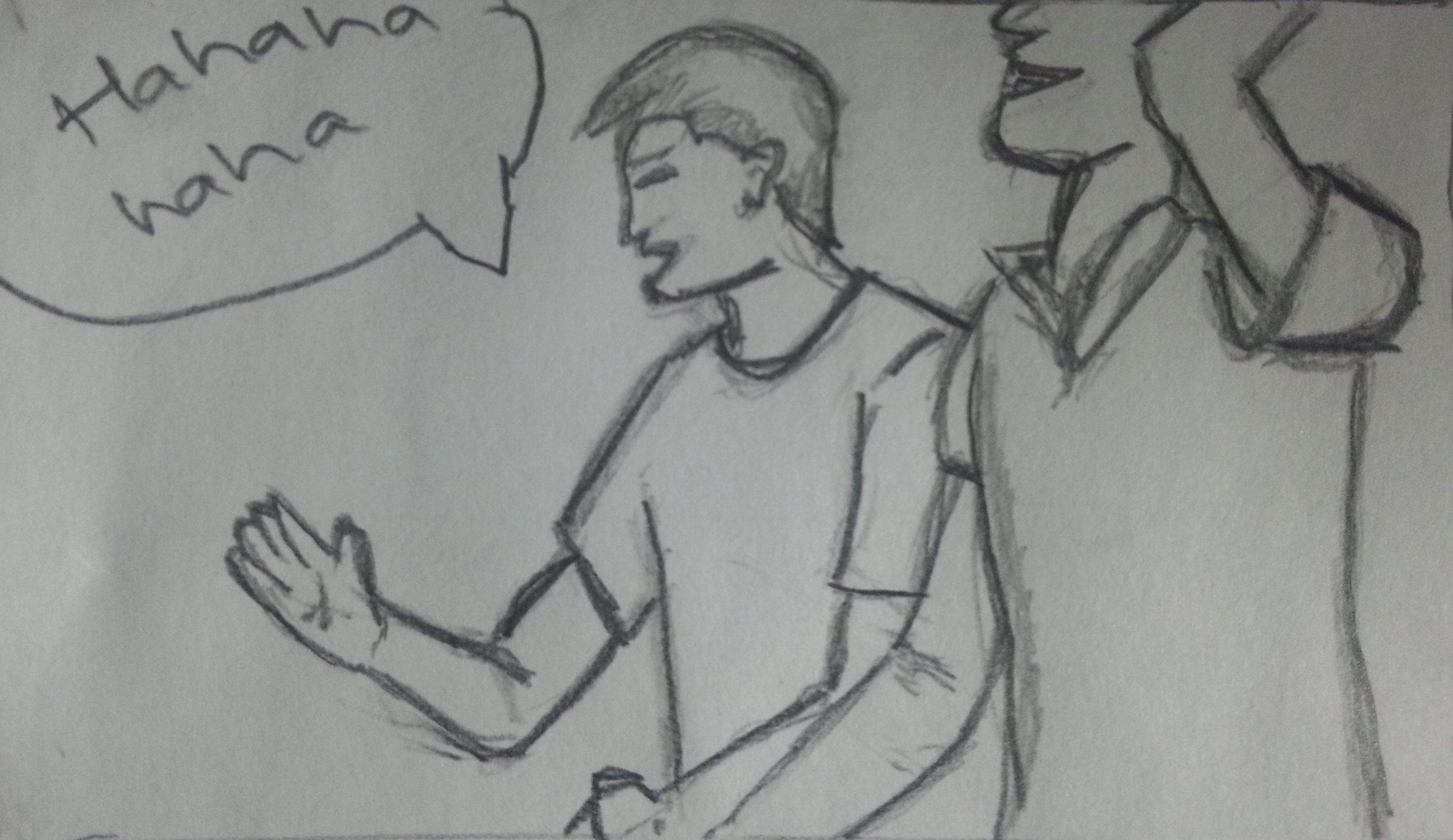
Di kampus, Nicholas mulai mendapat perlakuan “bully” dari teman-temannya. Ia diselengkat oleh Brando hingga terjatuh.
SCENE 2 – CUT 2
Action:
Setelah terjatuh, Nicholas semakin ditertawai habis-habisan oleh ketiga temannya. Ia berusaha menerimanya dengan lapang dada.
SCENE 3 – CUT 1
Action:
Nicholas duduk di foodcourt sendirian tanpa teman seorangpun. Ia iri terhadap mahasiswa lainnya yang bisa bercanda tawa dengan teman-temannya.
SCENE 3 – CUT 2
Action:
Menggambarkan kumpulan orang-orang yang sedang diperhatikan Nicholas.

SCENE 4 – CUT 1
Action:
Sesampainya di kosan, Nicholas merenungi kejadian yang menimpanya tadi di kampus. Ia merasa sedih.
SCENE 4 – CUT 2
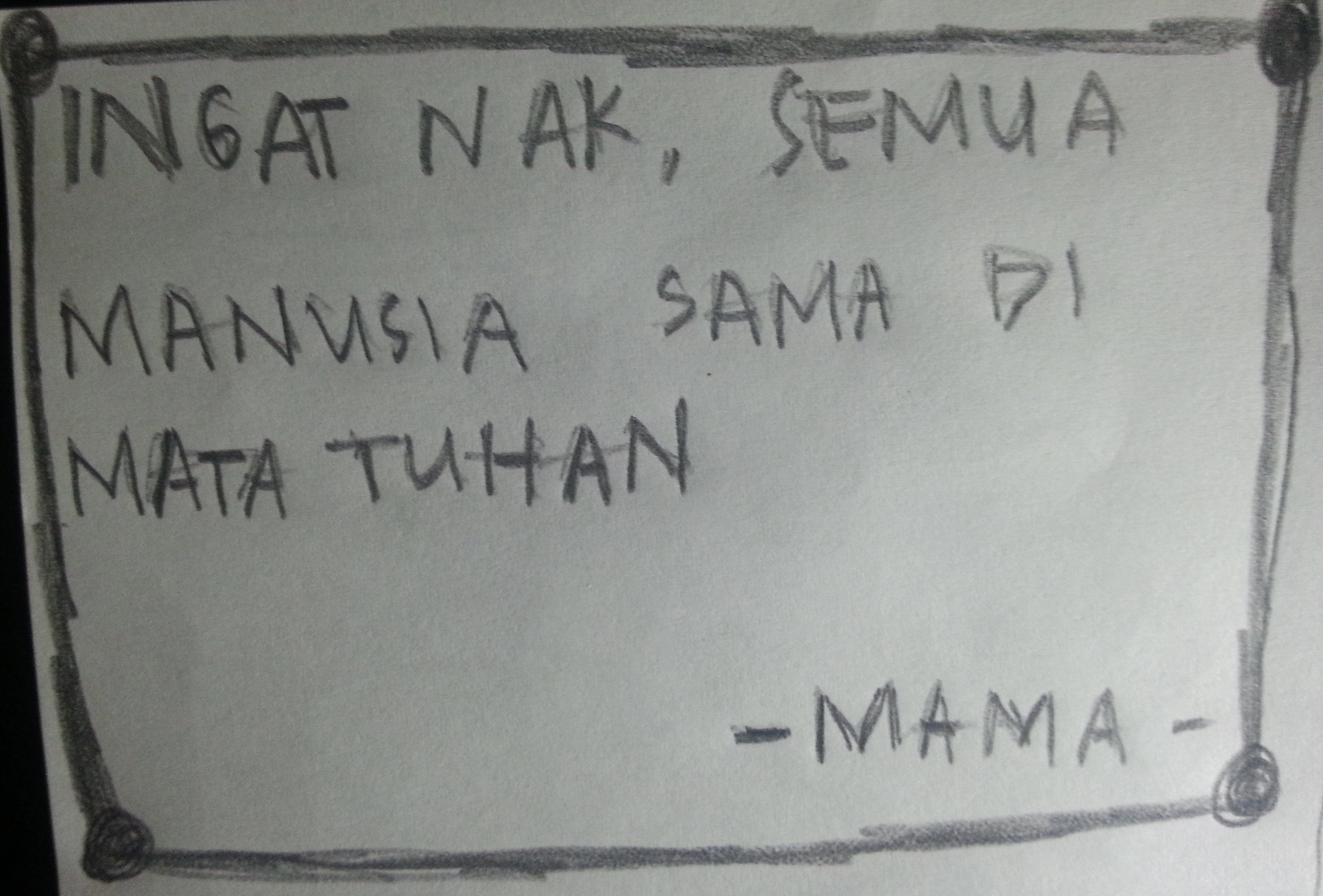
Action:
Ia memandangi poster yg berisikan motivasi dari Ibunya, yang mulai ia sadari bahwa kalimat tersebut tidak sesuai dengan kehidupannya.
SCENE 5 – CUT 1
Action:
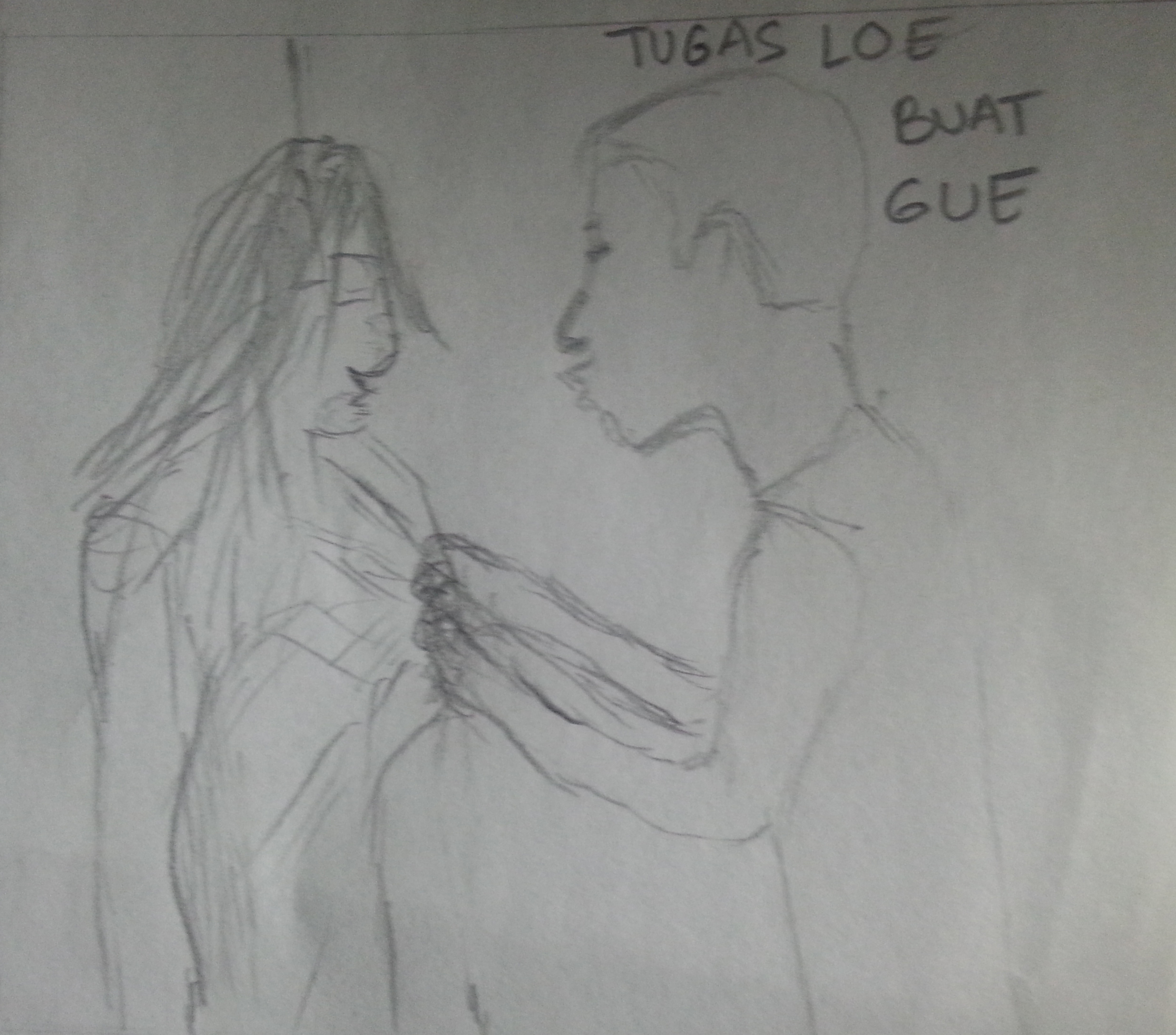
Baru saja sampai di kampus, tiba-tiba Anto datang merebut tugas milik Nicholas. Anto mengancam Nicholas agar tidak memberitahukan hal tersebut kepada dosen.

SCENE 6 – CUT 1
Action:
Nicholas dimarahi oleh dosen karena tidak mengumpulkan tugas.

SCENE 6 – CUT 2
Action:
Menggambarkan ekspresi dosen yang sedang marah.
SCENE 7 – CUT 1
Action:
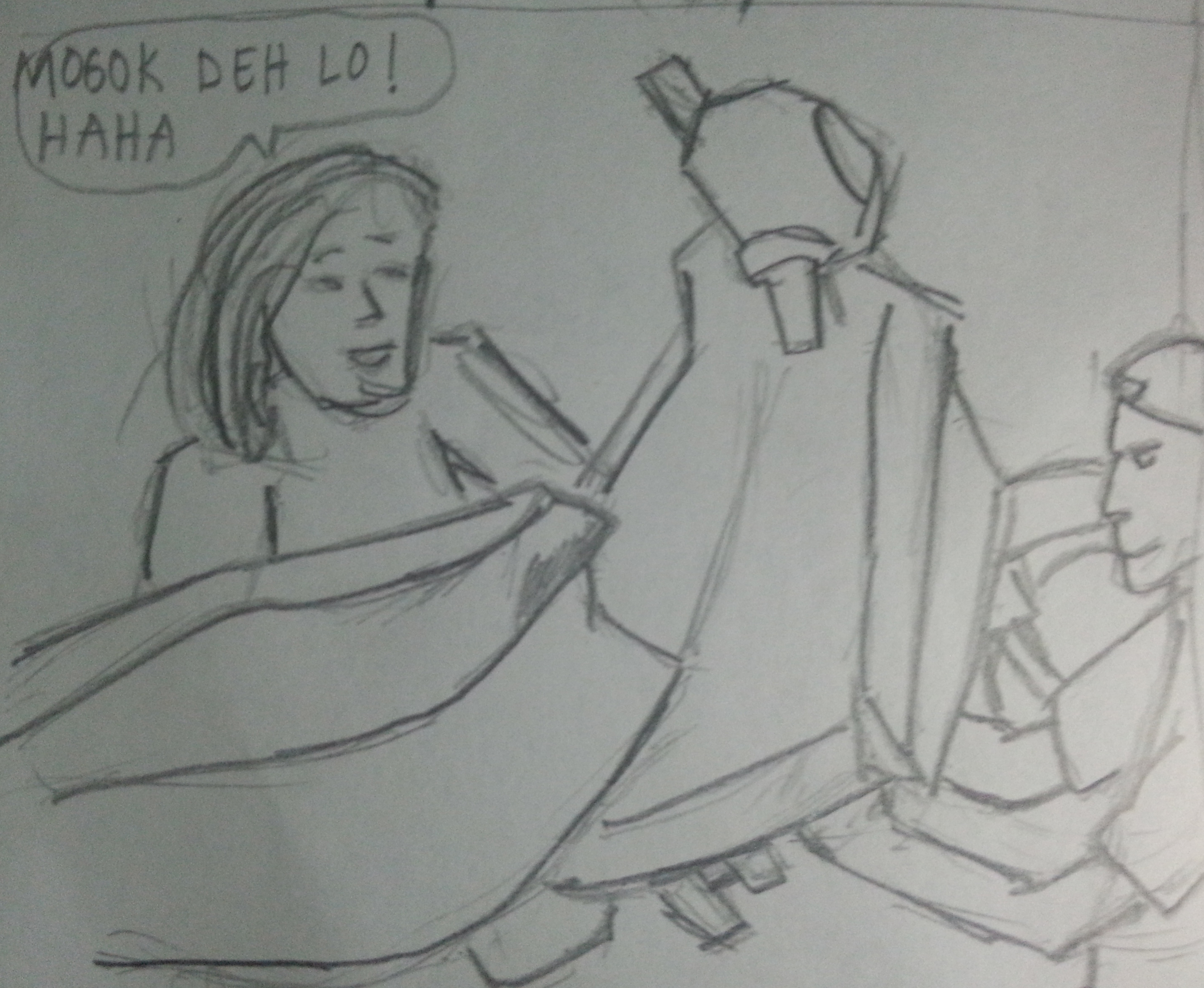
Cesar dan Handi sedang mengerjai motor milik Nicholas agar motor tersebut mogok.

SCENE 7 – CUT 2
Action:
Nicholas mencoba menyalakan motornya berkali-kali namun hasilnya nihil. Ia terpaksa mendorong motornya pulang.

SCENE 8 – CUT 1
Action:
Nicholas pulang ke kosan dengan penuh amrah dan rasa frustasi. Ia merobek-robek kertas poster motivasi yang tertempel di dinding kamarnya.
SCENE 8 – CUT 2
Action:
Nicholas memotong nadinya dengan gunting. Ia bunuh diri karena depresi yang begitu dalam.
4. Link untuk menonton video ini di Youtube, klik disini
url: http://www.youtube.com/watch?v=U741hAN4SmQink
BACKLINK KE BINUS.AC.ID, KLIK DISINI
1. Apa yang dimaksud Adversarial Search & Constraint Satisfaction Problems? berikan contoh
Pengertian Adversarial Search
Adversarial Search bekerja dengan cara menghitung langkah terbaik dalam dua pertandingan pemain di mana semua informasi tersedia. Secara teoritis, algoritma pencarian ini didasarkan teorema minimax von Neumann yang menyatakan bahwa dalam jenis permainan selalu ada serangkaian strategi yang mengarah ke kedua pemain untuk mendapatkan nilai yang sama.
CONTOH: PERMAINAN CATUR, TIC TAC TOE
Pengertian & contoh Constraint Satisfaction Problems
CSP atau Constraint Satisfaction Problem adalah permasalahan yang tujuannya adalah mendapatkan suatu kombinasi variabel-variabel tertentu yang memenuhi aturan-aturan (constraints) tertentu.
CONTOH: MAP-COLORING
2. Apa itu Propositional Logic? Berikan contoh?
Pengertian
-Propositional logic merupakan salah satu bentuk (bahasa) representasi logika yang paling tua dan paling sederhana.
-Dengan cara ini beberapa fakta dapat digambarkan dan dimanipulasi dengan menggunakan aturan-aturan aljabar Boolean.
-Propositional logic membentuk statement sederhana atau statement yang kompleks dengan menggunakan propositional connective, dimana mekanisme ini menentukan kebenaran dari sebuah statement kompleks dari nilai kebenaran yang direpresentasikan oleh statement lain yang lebih sederhana.
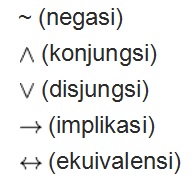
-Contoh operator logika pada Propositional Logic:
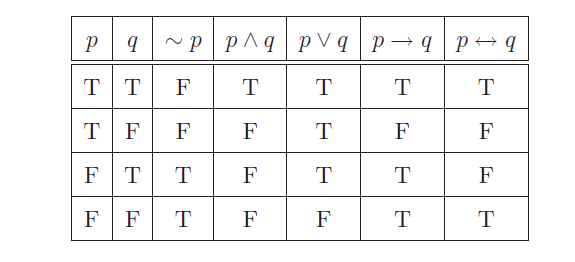
Tabel Kebenaran:
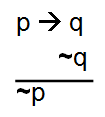
Contoh Propositional Logic
Jika Anto adalah mahasiswa yang baik maka ia pasti tidak menyontek di ujian
Anto menyontek dalam ujian
___________________________________________________________
Anto bukan mahasiswa yang baik
Dilambangkan:
3. Buat coding (Boleh C, C++ atau Java) untuk Algoritma A & Algoritma A* (A Star)?
Contoh menggunakan C++ (jujur pak belom ngerti, ini saya dapet hasil googling)
#include <iostream>
#include <iomanip>
#include <queue>
#include <string>
#include <math.h>
#include <ctime>
using namespace std;
const int n=60; // horizontal size of the map
const int m=60; // vertical size size of the map
static int map[n][m];
static int closed_nodes_map[n][m]; // map of closed (tried-out) nodes
static int open_nodes_map[n][m]; // map of open (not-yet-tried) nodes
static int dir_map[n][m]; // map of directions
const int dir=8; // number of possible directions to go at any position
// if dir==4
//static int dx[dir]={1, 0, -1, 0};
//static int dy[dir]={0, 1, 0, -1};
// if dir==8
static int dx[dir]={1, 1, 0, -1, -1, -1, 0, 1};
static int dy[dir]={0, 1, 1, 1, 0, -1, -1, -1};
class node
{
// current position
int xPos;
int yPos;
// total distance already travelled to reach the node
int level;
// priority=level+remaining distance estimate
int priority; // smaller: higher priority
public:
node(int xp, int yp, int d, int p)
{xPos=xp; yPos=yp; level=d; priority=p;}
int getxPos() const {return xPos;}
int getyPos() const {return yPos;}
int getLevel() const {return level;}
int getPriority() const {return priority;}
void updatePriority(const int & xDest, const int & yDest)
{
priority=level+estimate(xDest, yDest)*10; //A*
}
// give better priority to going strait instead of diagonally
void nextLevel(const int & i) // i: direction
{
level+=(dir==8?(i%2==0?10:14):10);
}
// Estimation function for the remaining distance to the goal.
const int & estimate(const int & xDest, const int & yDest) const
{
static int xd, yd, d;
xd=xDest-xPos;
yd=yDest-yPos;
// Euclidian Distance
d=static_cast<int>(sqrt(xd*xd+yd*yd));
// Manhattan distance
//d=abs(xd)+abs(yd);
// Chebyshev distance
//d=max(abs(xd), abs(yd));
return(d);
}
};
// Determine priority (in the priority queue)
bool operator<(const node & a, const node & b)
{
return a.getPriority() > b.getPriority();
}
// A-star algorithm.
// The route returned is a string of direction digits.
string pathFind( const int & xStart, const int & yStart,
const int & xFinish, const int & yFinish )
{
static priority_queue<node> pq[2]; // list of open (not-yet-tried) nodes
static int pqi; // pq index
static node* n0;
static node* m0;
static int i, j, x, y, xdx, ydy;
static char c;
pqi=0;
// reset the node maps
for(y=0;y<m;y++)
{
for(x=0;x<n;x++)
{
closed_nodes_map[x][y]=0;
open_nodes_map[x][y]=0;
}
}
// create the start node and push into list of open nodes
n0=new node(xStart, yStart, 0, 0);
n0->updatePriority(xFinish, yFinish);
pq[pqi].push(*n0);
open_nodes_map[x][y]=n0->getPriority(); // mark it on the open nodes map
// A* search
while(!pq[pqi].empty())
{
// get the current node w/ the highest priority
// from the list of open nodes
n0=new node( pq[pqi].top().getxPos(), pq[pqi].top().getyPos(),
pq[pqi].top().getLevel(), pq[pqi].top().getPriority());
x=n0->getxPos(); y=n0->getyPos();
pq[pqi].pop(); // remove the node from the open list
open_nodes_map[x][y]=0;
// mark it on the closed nodes map
closed_nodes_map[x][y]=1;
// quit searching when the goal state is reached
//if((*n0).estimate(xFinish, yFinish) == 0)
if(x==xFinish && y==yFinish)
{
// generate the path from finish to start
// by following the directions
string path=””;
while(!(x==xStart && y==yStart))
{
j=dir_map[x][y];
c=’0’+(j+dir/2)%dir;
path=c+path;
x+=dx[j];
y+=dy[j];
}
// garbage collection
delete n0;
// empty the leftover nodes
while(!pq[pqi].empty()) pq[pqi].pop();
return path;
}
// generate moves (child nodes) in all possible directions
for(i=0;i<dir;i++)
{
xdx=x+dx[i]; ydy=y+dy[i];
if(!(xdx<0 || xdx>n-1 || ydy<0 || ydy>m-1 || map[xdx][ydy]==1
|| closed_nodes_map[xdx][ydy]==1))
{
// generate a child node
m0=new node( xdx, ydy, n0->getLevel(),
n0->getPriority());
m0->nextLevel(i);
m0->updatePriority(xFinish, yFinish);
// if it is not in the open list then add into that
if(open_nodes_map[xdx][ydy]==0)
{
open_nodes_map[xdx][ydy]=m0->getPriority();
pq[pqi].push(*m0);
// mark its parent node direction
dir_map[xdx][ydy]=(i+dir/2)%dir;
}
else if(open_nodes_map[xdx][ydy]>m0->getPriority())
{
// update the priority info
open_nodes_map[xdx][ydy]=m0->getPriority();
// update the parent direction info
dir_map[xdx][ydy]=(i+dir/2)%dir;
// replace the node
// by emptying one pq to the other one
// except the node to be replaced will be ignored
// and the new node will be pushed in instead
while(!(pq[pqi].top().getxPos()==xdx &&
pq[pqi].top().getyPos()==ydy))
{
pq[1-pqi].push(pq[pqi].top());
pq[pqi].pop();
}
pq[pqi].pop(); // remove the wanted node
// empty the larger size pq to the smaller one
if(pq[pqi].size()>pq[1-pqi].size()) pqi=1-pqi;
while(!pq[pqi].empty())
{
pq[1-pqi].push(pq[pqi].top());
pq[pqi].pop();
}
pqi=1-pqi;
pq[pqi].push(*m0); // add the better node instead
}
else delete m0; // garbage collection
}
}
delete n0; // garbage collection
}
return “”; // no route found
}
int main()
{
srand(time(NULL));
// create empty map
for(int y=0;y<m;y++)
{
for(int x=0;x<n;x++) map[x][y]=0;
}
// fillout the map matrix with a ‘+’ pattern
for(int x=n/8;x<n*7/8;x++)
{
map[x][m/2]=1;
}
for(int y=m/8;y<m*7/8;y++)
{
map[n/2][y]=1;
}
// randomly select start and finish locations
int xA, yA, xB, yB;
switch(rand()%8)
{
case 0: xA=0;yA=0;xB=n-1;yB=m-1; break;
case 1: xA=0;yA=m-1;xB=n-1;yB=0; break;
case 2: xA=n/2-1;yA=m/2-1;xB=n/2+1;yB=m/2+1; break;
case 3: xA=n/2-1;yA=m/2+1;xB=n/2+1;yB=m/2-1; break;
case 4: xA=n/2-1;yA=0;xB=n/2+1;yB=m-1; break;
case 5: xA=n/2+1;yA=m-1;xB=n/2-1;yB=0; break;
case 6: xA=0;yA=m/2-1;xB=n-1;yB=m/2+1; break;
case 7: xA=n-1;yA=m/2+1;xB=0;yB=m/2-1; break;
}
cout<<“Map Size (X,Y): “<<n<<“,”<<m<<endl;
cout<<“Start: “<<xA<<“,”<<yA<<endl;
cout<<“Finish: “<<xB<<“,”<<yB<<endl;
// get the route
clock_t start = clock();
string route=pathFind(xA, yA, xB, yB);
if(route==””) cout<<“An empty route generated!”<<endl;
clock_t end = clock();
double time_elapsed = double(end – start);
cout<<“Time to calculate the route (ms): “<<time_elapsed<<endl;
cout<<“Route:”<<endl;
cout<<route<<endl<<endl;
// follow the route on the map and display it
if(route.length()>0)
{
int j; char c;
int x=xA;
int y=yA;
map[x][y]=2;
for(int i=0;i<route.length();i++)
{
c =route.at(i);
j=atoi(&c);
x=x+dx[j];
y=y+dy[j];
map[x][y]=3;
}
map[x][y]=4;
// display the map with the route
for(int y=0;y<m;y++)
{
for(int x=0;x<n;x++)
if(map[x][y]==0)
cout<<“.”;
else if(map[x][y]==1)
cout<<“O”; //obstacle
else if(map[x][y]==2)
cout<<“S”; //start
else if(map[x][y]==3)
cout<<“R”; //route
else if(map[x][y]==4)
cout<<“F”; //finish
cout<<endl;
}
}
getchar(); // wait for a (Enter) keypress
return(0);
}
BACKLINK KE BINUS.AC.ID, KLIK DISINI
Welcome to Binusian blog.
This is the first post of any blog.binusian.org member blog. Edit or delete it, then start blogging!
Happy Blogging 🙂